
Grantee Research Project Results
2013 Progress Report: Development of Mobile Self-Powered Sensors for Potable Water Distribution
EPA Grant Number: R834868Title: Development of Mobile Self-Powered Sensors for Potable Water Distribution
Investigators: Banks, M. Katherine , Brovont, Aaron D , Salim, Amani , Porterfield, Marshall , Wu, Ruoxi , Pekarek, Steve , Jefferson, Travis
Institution: Purdue University
EPA Project Officer: Page, Angela
Project Period: January 1, 2011 through December 31, 2013 (Extended to December 31, 2014)
Project Period Covered by this Report: December 1, 2012 through January 2,2014
Project Amount: $599,997
RFA: Advancing Public Health Protection through Water Infrastructure Sustainability (2009) RFA Text | Recipients Lists
Research Category: Drinking Water , Water
Objective:
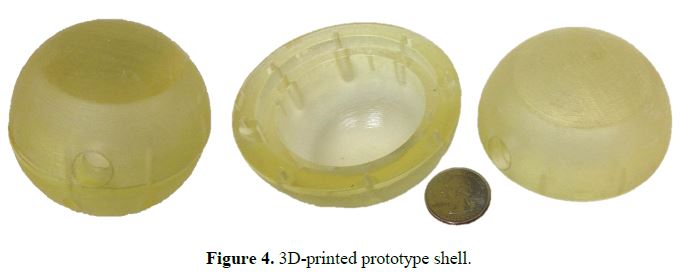
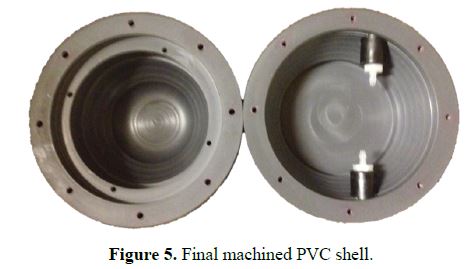
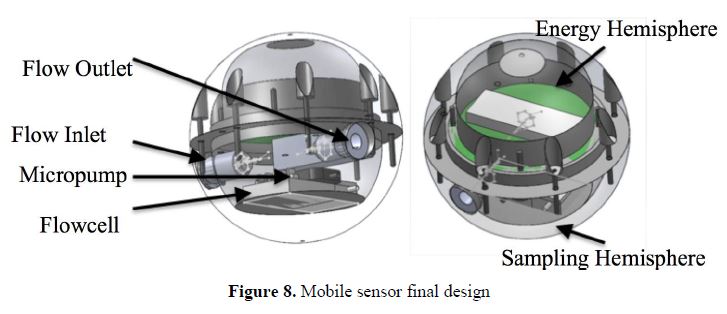
In this year’s effort, a second generation mobile sensor system is being designed and fabricated for water quality monitoring in a potable water distribution system. The research being conducted is focused on the areas of (1) sensor research and device fabrication, (2) packaging design and fabrication, (3) integration with electronic components, and (4) application testing of water quality sensors.
Progress Summary:
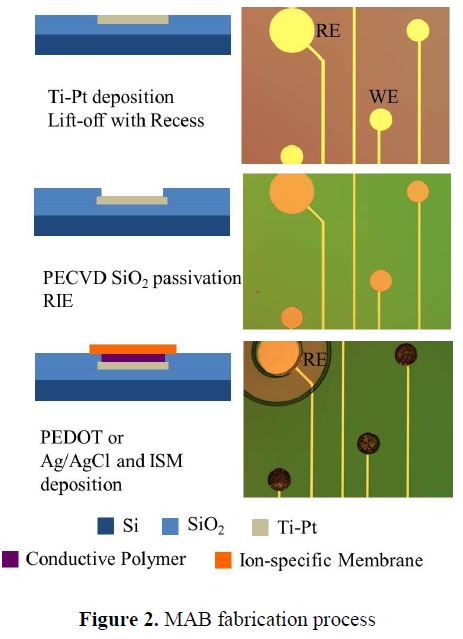
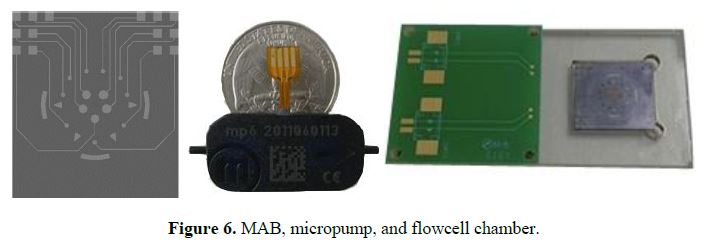
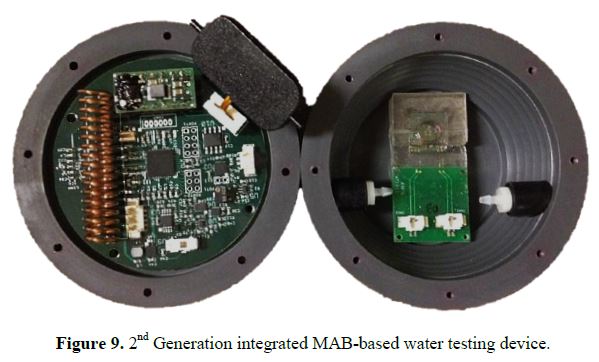
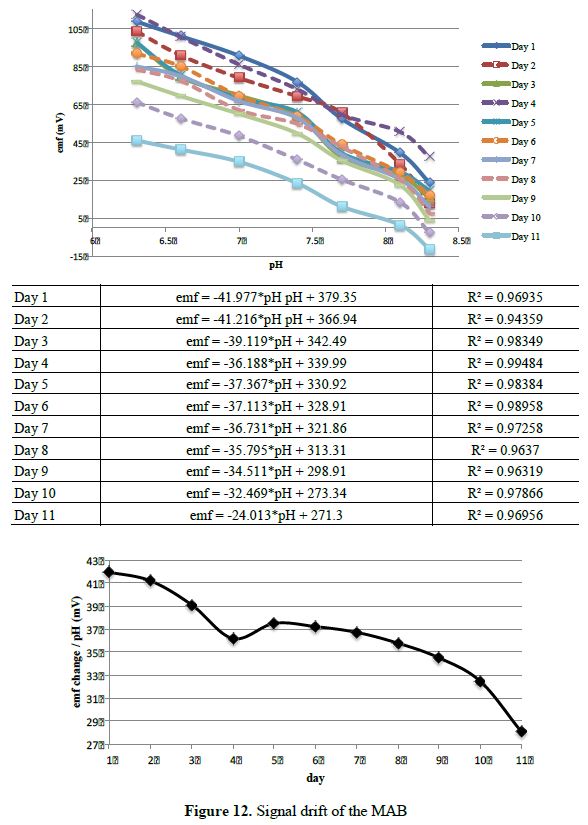
In the second generation MAB, the fabrication process was further refined by replacing the PEDOT:PSS WEs with Ag/AgCl and depositing a thinner ISM (e.g., drop-coating VS spin-coating) on the WEs. This is to ensure a faster response time (e.g., 5 min vs 1 min) and simplified the fabrication process (e.g., no electrochemical deposition of PEDOT:PSS is required). Additionally, a UV curable epoxy (Su8) was fabricated on the MAB to hold the O-ring in place to prevent leakage. Furthermore, the Ag/AgCl layer on the RE was deposited via chloriding bathing process in 4% sodium hypochlorite rather than using a Ag/AgCl ink. This is done by depositing an extra layer of Ag on top of the Pt of the working and reference electrodes. The detailed fabrication process is shown in Figure 2 for both the first and second generations.

Future Activities:
It is anticipated that in the final year, there are three avenues to pursue. First, to establish the energy harvest unit for the sensing system, we had developed relatively sophisticated models of the sensor movement. These will be validated so that the next generation of water sensor designers can have confidence in the energy per volume predicted in this research. This will entail adding an inertial measurement unit and the accompanying control software to the existing sensing system to measure movement. Second, in the initial efforts, we have been evaluating the possibility of adding leak detection to the suite of sensing options. We have purchased a hydrophone and data acquisition system and set up a testbed to perform acoustic noise studies. To date, we have not come to a conclusion about the practical implementation of such a sensor. Additional leak detection studies will be performed to come to some conclusion about whether a mobile sensor can be used in such an application. Finally, we would like to predict the expected transmission distance of the wireless sensors in a variety of pipe materials (plastic, metal), to enable the design of stationary antennas and the power required for the transmission.
References:
- D. S. Sakong, M. J. Cha, J. H. Shin, G. S. Cha, M. S. Ryu, R. W. Hower and R. B. Brown, Sensors and Actuators B-Chemical, 1996, 32, 161-166.
- D. Liu, M. E. Meyerhoff, H. D. Goldberg and R. B. Brown, Analytica Chimica Acta, 1993, 274, 37-46.
- N. H. Kwon, M. S. Won, D. S. Park and Y. B. Shim, Electroanalysis, 2005, 17, 641-647.
- S. Anastasova-Ivanova, U. Mattinen, A. Radu, J. Bobacka, A. Lewenstam, J. Migdalski, M. Danielewskic and D. Diamond, Sensors and Actuators B-Chemical, 2010, 146, 199-205.
- A. Bratov, N. Abramova, C. Dom ngue , A. Baldi, Ion-selective field effect transistor (ISFET)-based calcium ion sensor with photocured polyurethane membrane suitable for ionised calcium determination in milk, Analytica Chimica Acta 408 (2000) 57-64.
- M.S. Ghauri, J.D.R. Thomas, Evaluation of an ammonium ionophore for use in poly(vinyl chloride) membrane ion-selective electrodes: solvent mediator effects, Analyst 119 (1994) 2323-2326.
- M. Maj-Zurawska, M. Rouilly, W.E. Morf, W. Simon, Determination of magnesium and calcium in water with ion-selective electrodes, Analytica Chimica Acta 218 (1989) 47-59.
- M. Otto, J.D.R. Thomas, Model studies on multiple channel analysis of free magnesium, calcium, sodium, and potassium at physiological concentration levels with ion-selective electrodes, Analytical Chemistry 57 (1985) 2647-2651.
- M. Rothmaier, W. Simon, Chloride-selective electrodes based on mercury organic compounds as neutral carriers, Analytica Chimica Acta 271 (1993) 135-141.
- EPA, “Distribution System Water Quality Monitoring: Sensor Technology Evaluation Methodology and Results: A Guide for Sensor Manufacturers andWater Utilities,” 2009, EPA/600/R-09/076.
- GLI International, Inc., Operating Instrustion Manual of Hach/GLIModel P53 pH/ORP Analyzer, 2001, Rev. 7-1201
- YSI. Inc., 6-Series Multiparameter Water Quality Sondes User Manual, 2011. 11, Rev. H.
- Hach Company, Hydrolab DS5X, DS5, and MS5 Water Quality Multiprobes User Manual, 2006. 02, Edition 3.
- In-Situ Inc., Multi-Parameter TROLL 9000, WQP-100 Operator’s Manual, 2005, rev. 010 09/05
Journal Articles on this Report : 2 Displayed | Download in RIS Format
| Other project views: | All 15 publications | 3 publications in selected types | All 3 journal articles |
|---|
| Type | Citation | ||
|---|---|---|---|
|
|
Howard RA, Xiao Y, Pekarek SD. Modeling and design of air-core tubular linear electric drives. IEEE Transactions of Energy Conversion 2013;28(4):793-804. |
R834868 (2013) R834868 (Final) |
Exit |
|
|
Wan Salim WWA, Zeitchek MA, Hermann AC, Ricco AJ, Tan M, Selch F, Fleming E, Bebout BM, Bader MM, Ul Haque A, Porterfield DM. Multi-analyte biochip (MAB) based on all-solid-state ion-selective electrodes (ASSISE) for physiological research, Journal of Visualized experiments: JoVE 2013;74:50020. |
R834868 (2013) R834868 (Final) |
Exit |
Supplemental Keywords:
Contamination, drinking water, sensors, water distribution system, potable water distribution, security of drinking water systemProgress and Final Reports:
Original AbstractThe perspectives, information and conclusions conveyed in research project abstracts, progress reports, final reports, journal abstracts and journal publications convey the viewpoints of the principal investigator and may not represent the views and policies of ORD and EPA. Conclusions drawn by the principal investigators have not been reviewed by the Agency.